エンジニア向け ROS/ROS2 テクニカルセミナー
テクニカルセミナー
これまでロボットやロボット設備は開発するためのコストが非常に高額になることから、一部の大企業でしか使えないものでした。
しかし、近年の技術進歩、OSS(オープンソースソフトウェア)の進化・普及により、ロボットやロボット設備を低コストで開発できる環境が整ってきました。 これにより、ロボットやロボット設備を用いて業務の自動化・効率化を進める機運が高まっています。
自社でロボットやロボット設備を開発・運用しようとした場合、経験者に相談することが非常に効果的です。 なぜなら、ロボットに関する技術は非常に多岐にわたっており、ゼロから学ぼうとすると大変な労力が必要になるためです。
想造技研では、これまでロボット本体やロボット設備開発の経験をもとに、自社でのロボット開発に有用なROS/ROS2の技術セミナーの講師をお受けしています。
セミナー内容についてはご相談も承りますので、お気軽にお問い合わせください。
セミナー内容
ROS/ROS2 入門講座
ROSは、世界中で広く使用されているロボット用の制御ツールです。
様々なライブラリが用意されており、高性能なロボットシステムを容易に構築することが出来ます。
また、オープンソースソフトウェアであるため、全て無償で使用することが出来ます。
本セミナーではROSの概要から簡単なシミュレートモデルを動作させるところまでを体験することでROSの理解を深めることが出来ます。
また、ROSの後継OSSであるROS2についてもROS2の概要・ROSとの違い、簡単なシミュレートモデルを動作させるまでを解説する入門講座を実施しています。
ROS/ROS2 実践講座
マニピュレータ制御
ROS/ROS2の基礎は学んだが、自社で開発したロボットなどの実機にどのように使っていけば良いか、実践方法を知りたい方向けの講座です。
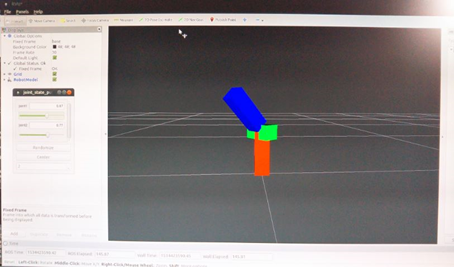
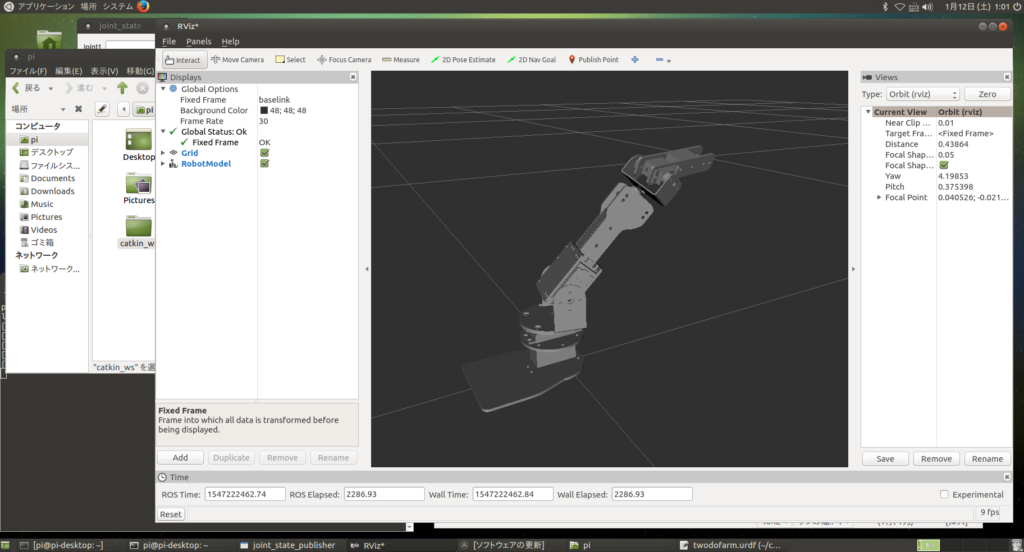
本講座では、Ubuntu上で動くシミュレーションモデルを作成し、実機と連動させ制御が出来るようになるまでの流れを解説します。
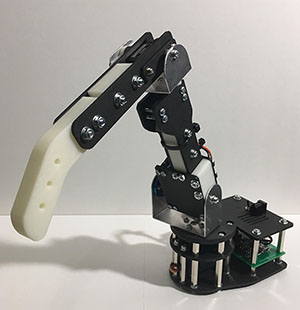
オリジナルの4軸アームロボットを題材とし、CADデータの取り込みから、URDFによるシミュレーションモデルの作成・動作、Arduinoを使用した実機との通信といった、具体的なノウハウを学ぶことが出来ます。
また、ROS/ROS2を使用して産業用ロボットで実施するような手先の移動地点を指定し、そのポイントまでロボットが移動する軌道を計算する計算するといった高度な使用方法に関する解説も可能です。
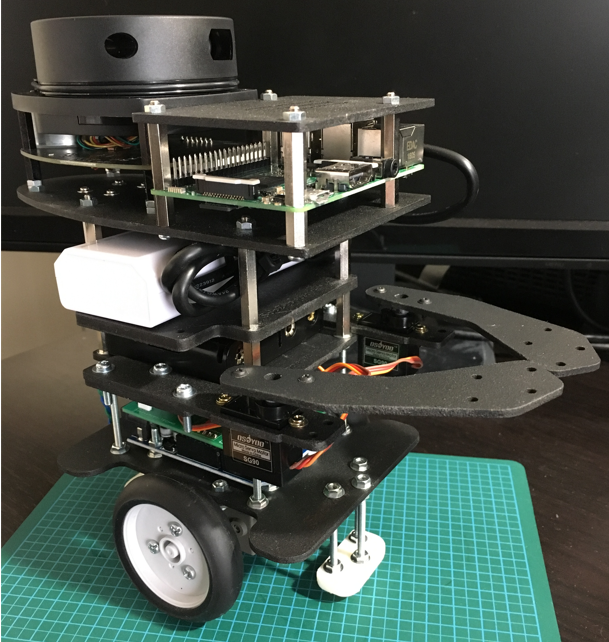
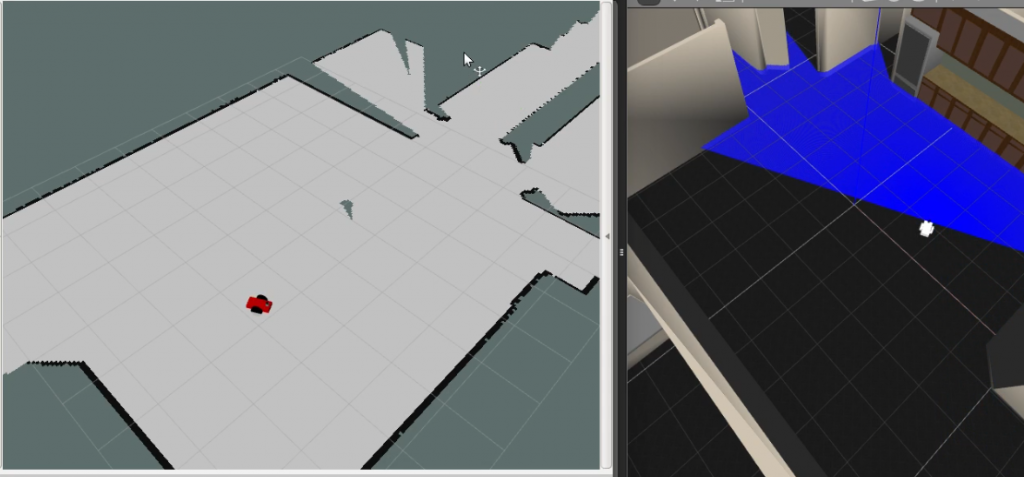
ナビゲーション制御
サービスロボットなどで実施されているロボットが移動するためのフィールドの地図を作成し、地図上の任意のポイントまでロボットを移動させる、ナビゲーション制御をROS/ROS2を用いて実現する手順についても解説可能です。

ご質問・ご相談などありましたらお気軽にご相談ください。